This Panzerschreck is being sold by Morphys on October 30, 2018.
The German military first encountered American Bazookas in Tunisia in 1943, and quickly put in place a program to copy and improve on the design. At that point, the latest German antitank weapons was the Raketenwerfer 43 “Puppchen”, which was a locked-breech rocket launcher built on a carriage like a standard AT gun. It had a substantial range and a very effective 88mm shaped charge warhead, but lacked the one-man mobility offered by the Bazooka. So, the Raketenpanzerbuchse 43 – shortly thereafter renamed the Panzerschreck – was developed in late 1943.
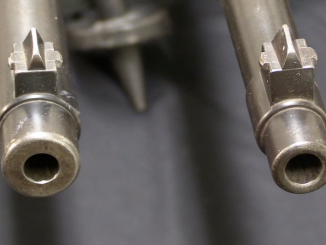
The Panzerschreck kept the 88mm bore of the Puppchen, so that the warhead could be kept unchanged. The rear half of the munition was redesigned to fit an open tube type of launcher. The early Bazookas captured by German forces were at that time fitted with a battery-powered firing system, which the Germans opted to replace (as would the Americans, in later versions). The Panzerschreck trigger used a small generator, where a heavy spring pushed an iron core through a copper winding and magnet, this creating an electrical charge to fire the rocket.
One shortcoming of the Panzerschreck compared to the Bazooka was that the German rockets did not burn completely within the launch tube – the motors continued to fire for about the first 2 meters of flight. This meant that the shooter would receive substantial burns to the face and hands if protective gear was not worn when firing. Initially, troops were instructed to wear filter-less gas masks and winter gloves when shooting, but it was quickly recognized that this was an impractical burden. Soldiers in the field began to craft protective shields to mount on the tubes, and these were formalized in a windowed shield was introduced in 1944 as standard on new production launchers and as a kit to retrofit existing weapons in the field.


“Racketenwerfer 43 “Puppchen””
Raketenwerfer and Püppchen
“Rackenetpanzerbuchse 43”
Raketen–Panzerbüchse
Thanks for the transliteration fixes. I also have a hint for anyone carrying the launcher tube: hide unless you want to get tank shells in the face! Playing Hollywood action hero tends to get lots of soldiers reduced to hamburger!
“Whatever you do, do not get shot!”
According to https://www.jaegerplatoon.net/OTHER_AT_WEAPONS2.htm
after Finnish soldiers started usage of Panzerschreck (known to them as Panssarikauhu) recommended painting them with camo pattern.
“Playing Hollywood action hero tends to get lots of soldiers reduced to hamburger!”
Imagine you are a Berliner and suddenly you become a Hamburger.
‘If the enemy is in range, SO ARE YOU!’ Especially if you have the rocket launcher…
Interesting mix of the practical with the easily replaceable ‘window’–soldiers could easily cut replacements from any plate glass–with questionable adjustable sights; an experienced gunner could likely do as well just eyeballing his shots.
Daweo,
you are correct that “Püppchen” (little puppet) is a frequent German word. But for a change, the intelligence reports have got the German name “Puppchen” for the 8.8 cm Raketenwerfer 43 right. Puppchen is a nickname for a young lady, as in the song “Puppchen, du bist mein Augenstern” from 1913.
“German military first encountered American Bazookas in Tunisia in 1943, and quickly put in place a program to copy and improve on the design”
I want to note that Germany captured Bazooka in Tunisia and on Eastern Front (delivered to USSR under Lend-Lease Act) in very similar time, though I generally encountered late 1942 as date for Soviet forces and Operation Torch for U.S. forces, which imply November 1942. Anyway, independently from where first was captured, there is stark contrast between USA-USSR and III Reich-Empire of Japan co-operations in area of hand-held AT launchers. USA delivered Bazookas quickly after it become available, did III Reich deliver its AT launchers or at least know-how to Empire of Japan? Notice that during WWII they delivered theirs know-how, including high-tech, see for example cargo on board of U-234 during her last mission:
https://en.wikipedia.org/wiki/German_submarine_U-234#Cargo
yet they apparently do not deliver any examples of know-how regarding AT launchers, why?
Japanese developed their own AT launcher:
http://www3.plala.or.jp/takihome/AT.htm#ex
and even produced few thousands and store it awaiting battle of Japanese main islands.
Notice that Type 4 70 mm AT Rocket Launcher is bit lighter than Offenrohr (8 kg vs 9,5 kg) but has more than 2 times less penetration (80 mm vs 210 mm).
German Panzerfaust (klein) should be useful in conditions of PTO and also should appeal to Japanese command thanks to low price.
As side note: notice over-caliber warhead used Type 5 45 mm Recoilless Gun, predating well-known RPG-7
is: “(…)used Type(…)”
should be: “(…)used in Type(…)”
After some search I have doubts about stated penetration, this site:
https://www.jaegerplatoon.net/OTHER_AT_WEAPONS2.htm
gives penetration of Raketenpanzerbüsche 54 as 230 mm at 90° impact, 160 mm at 60°, 95 mm at 30° according to German sources and 100 mm at 60° according to Finnish tests.
Something doesn’t match here, which mean following possibilities:
1. different testing method (different steel and/or required % of penetrations)
2. Raketenpanzerbüsche 54 was much less effective than claimed by Germans
3. these ° are not compatible if, German-style was used for German sources (90° = vertical plate) and Soviet-style was for Finnish test (0° = vertical plate), which would mean German 30° is equal to Finnish 60° and would imply that these data are matching each other (as for same angle, Germans observed 95 mm and Finns 100 mm, which might be explained by difference of steel plates used)
The major reason that the Japanese did not get a Panzerschreck copy, or even one of the simpler recoilless gun type Panzerfaust, is that until very late in the war their military ordnance departments (Army and Navy) had little interest in rocket weapons, and none in recoilless guns, period. And their interest in rockets- such as it was- was concentrated on killing American bombers and warships, not tanks.
The Japanese wartime rocket research effort can be summed up in one name; Dr. Kumao Hino. Working at Tokyo University, he had segued from his pre-war work in blasting explosives for mining to developing solid rocket propellants. The IJN had some interest, mainly in what we now call JATOs, and gave him some financing, but weapon work was largely ignored.
Late in the war Dr. Hino developed a few things, like a “pusher” rocket for heavy artillery shells and large aerial bombs, allowing them to be launched from wooden troughs at Allied troops. These were needed because the Imperial forces were running short of the standard delivery systems for such ordnance, namely actual artillery pieces and aircraft.
There were also two surface-to-air solid-fuel rockets developed, the Funryu 2 and 4 (“Funryu” supposedly means “Flying Dragon” in Japanese), as anti-aircraft weapons to defend Japanese cities against the B-29 aka the “B-san”. Both were radio-controlled rather like the German Enzian and probably would have had about as much chance of actually hitting a Superfortress, that is to say “none”. (Funryu 1 was a liquid-propelled air-to-surface missile that never left the drawing board, and Funryu 3 was a liquid-propelled Funryu 2.)
The only other missile project that can be confirmed was one for an air-launched glide bomb similar to the American Bat and the German BV246. This curiosity, which was air drop tested in early August of ’45(!) was intended to use acoustic sensors to home in on the report and shock wave effects of the guns of American warships firing. (Ohhh-KAY.)
And of course there was the Ohka (Cherry Blossom) or in American, Baka (Idiot) air-launched manned flying bomb in both solid rocket (MK 11) and turbojet (MK 22) powered persuasions. Few “Baka bombs” ever succeeded in hitting Allied ships; their weight and drag tended to badly impede the speed and maneuverability of the Mitsubishi G4M “Betty” medium bombers hat carried and launched them, and most of the Bettys were shot down before they could launch the “Bakas”.
As for infantry anti-tank weapons, rocket projectors simply weren’t of any interest to the Japanese ground forces. Their definition of an infantry anti-tank weapon was the lunge mine;
http://i.imgur.com/2O2uQ71.jpg
As Ian Hogg once commented, the hollow charge would easily wreck a Sherman. It would also unfailingly blow the operator to bits.
The other typical Japanese anti-tank weapon was a sort of “command detonated” mine. A naval high-explosive shell was buried in the ground, fuze up, a reversion to the sort of “mine” concocted by Confederate General Gabriel Rains during the American Civil War eighty years earlier.
The “command detonated” part was having a soldier in the hole with the shell- and a hammer to hit the fuze with when a tank went over top of it.
The code of Bushido tended to result in very “direct” measures to get things done. And not much interest in more “technological” alternatives.
cheers
eon
Even if Japanese weapons doctrine was no rocket it is quite mind-boggling to me that they did not acquired examples or technology to craft Hafthohlladung
https://en.wikipedia.org/wiki/Hafthohlladung
which worked on same principle as LUNGE MINE but was giving some chances to tank hunter of staying alive (7.5 sec delay fuse not poke at tank to detonate). In fact Japanese used magnetic AT (but not HEAT) grenade Hako-Baku-Rai earlier
http://www.inert-ord.net/jap02h/grenades/t99mag/
so they should have no special problems with production and deploying Hafthohlladung, as they were able to produce both HEAT warhead and magnetic material.
The only problem was that every bit of permanent magnet stock they had in the 1944-45 timeframe was earmarked for electric motor production, specifically for the miniature submarines they anticipated using to destroy the American fleet if it dared to approach the Home Islands.
Here’s a shot of the production yard at Kure naval dockyard on 18 Oct ’45;
https://upload.wikimedia.org/wikipedia/commons/7/72/Kure_midget_subs1.jpg
Those are 80 miniature submarines capable of carrying two 21 inch Type 89 “oxygen torpedoes” (the semi-legendary “Long Lance”) each. There were five more pens just like this at Kure, each with about the same number of midget subs in it. And there were six other dockyards building them at the same time.
That’s a lot of electric motors. And a lot of permanent magnets needed to build them.
cheers
eon
“lot of permanent magnets needed to build them.”
Huh, so was there any material which was not in short supply at that time in Empire of Japan?
Maybe at least some cloth to produce Panzerwurfmine?
http://www.lonesentry.com/articles/panzerwurfmine/index.html
All in all it seems that technological co-operation between III Reich and Empire of Japan was at least poorly managed; notice that Empire even manage to buy Panzerkampfwagen VI, which could not be even delivered:
https://worldoftanks.eu/en/news/history/victim-circumstance-japan-tiger/
yet failed to acquire lighter weapons (or know-how to produce them) which might be useful against U.S. forces, at least in area in AT weapons: not only regarding various launchers and grenades, but also more classic AT cannons (5 cm Pak 38 for example)
D;
About the only thing Japan wasn’t short of at the time was rice paper. No, I am not joking.
The result was one of the odder weapon systems in history; the balloon bomb.
See Japan’s World War II Balloon Bomb Attacks on North America by Robert C. Mikesh (Smithsonian Annals of Flight publication No. 9);
https://repository.si.edu/bitstream/handle/10088/18679/SAoF-0009-Lo_res.pdf
cheers
eon
The Japanese did have the Type 97 AT rifle, which was quite powerful for its time. Unfortunately for the Japanese it could not reliably penetrate the frontal or even side armor of M3 Stuart, which for a light tank was quite well armored. The 20mm Lahti and Solothurn S18/1000 AT rifles had much better success early on due to the light armor of the Soviet (T-26 in particular) and British light tanks, and even early British cruiser tanks.
There was also the Type 3 AT grenade, which was a HEAT hand grenade somewhat similar to the German Panzerwurfmine and Soviet RPG-43. While far from perfect, it left the user a fair chance of surviving after use.
Ironically, the mechanism of the Type 97 rifle was derived from the Hotchkiss gas-operated machine gun, which was also the basis of the various Japanese Army light, medium, and heavy MGs, even the Type 99 light that was often mistakenly assumed to be a ZB26 copy like the Bren.
The Type 93 HMG in 13.2mm with box magazine feed was normally used on a single (average-size) or dual(large)tripod mount as an AA gun. What makes that interesting is that it was actually a licensed copy of the Hotchkiss Model 1932 13.2mm aircraft MG, but the contract stipulated that the Japanese not use it as an aircraft gun.
The IJN sensibly got around this by simply copying the U.S. Browning M1921 12.7mm (.50 cal.)machine gun as the Type 1 (1941), which became the standard fixed gun in most of their fighters not armed entirely with 20mm cannon.
At the same time, the Japanese Army developed the HO-5 20mm cannon, an enlarged copy of the M1921 in 20mm,which they considered a better fixed wing-mounted cannon than the Hispano types (HO-1 and HO-3) they’d used up to 1942.
At the same time, Army Ordnance and Naval BuOrd over here were insisting that it was flatly impossible to “scale up” the Browning .50 to 20mm, and even if you could, it wouldn’t work.
cheers
eon
“Ironically, the mechanism of the Type 97 rifle was derived from the Hotchkiss gas-operated machine gun”
I fail to see irony in that. Did they used this weapon against some French units?
Anyway, Hotchkiss proved to be scaling-friendly design, also Italians bought license for it: Regia Marina used 13,2 mm Hotchkiss variant made by Breda, while Royal Air Army used 20 mm Breda AA gun (20×138 B Long Solothurn cartridge) which was more or less up-scaled 13,2 mm weapon but with tray feed rather than box-feed as found in 13,2 mm weapon. Regia Marina also used further up-scaled variant, caliber 37 mm (cartridge 37×272 R):
http://www.navweaps.com/Weapons/WNIT_37mm-54_m1932.php
however due to flaws in design of twin mount or combination of flaws with gun itself and mount it wiggled wildly when fired in full-auto, which limiter gunners to either fire single shells or to barrage fire
–
Regarding aviation guns of Japan of WW2: it is, speaking mildly, complicated matter.
Both Ho-1 and Ho-3 fired 20x125SR cartridge, same as mentioned Type 97 AT rifle and also Type 98 AA gun.
Ho-5 fired 20×95 cartridge, which is smaller than 20×110 Hispano as used by USA during WW2.
Also Japanese version of .50 Browning (Ho-103) actually fired Italian 12.7×81 SR, as Japanese earlier introduce their variant of Italian Scotti machine gun firing that cartridge, although using pan magazines rather than belt (as Ho-101), hence Ho-103 has specific muzzle device (muzzle booster), unlike its parent (M1921) Ho-103 might be configured to fire from closed bolt or open bolt. So far acceptable: 2 different 20 mm cartridges, but now add IJN which uses 20x72RB cartridge (Type 99 early) and 20x101RB cartridge (Type 99 late), obviously incompatible with earlier cartridges. During search I encountered interesting table:
https://en.wikipedia.org/wiki/Type_99_cannon#20_mm_gun_table
GREAT! Yet another 20 mm cartridge 20x99RB for Type 94 flexible in Army section, whatever this is.
Apparently Japanese believed that whoever introduce more incompatible cartridges types into inventory of own forces would win war.
Also I must add Ho-103 (“Japanese 12,7 mm Browning”) was actually Army-only weapon, while IJN was looking for own (and being IJN its pride prevented adoption of already made Army gun). So, without further ago, IJN take at HMG:
http://www.quarryhs.co.uk/14mmO.pdf
yep, it is basically 20 mm Oerlikon, but with cartridge necked down to 14…15 mm cartridge. So at one time it guarantee need of yet another cartridge in supply (in addition to standard naval 13,2 x 99), is movement in exactly reverse direction of world trends of necking-up cartridge (to name few: pre-war 20x99R ShVAK is necked up 12,7x108R /this is NOT DShK cartridge), war-era MG 151/20 use 20×82 cartridge which is 15×96 necked up /shorter case to fit longer shell/, also 20×102 /best-known for usage M61 Vulcan/ from early Cold War-era is necked up .60 cartridge) and guarantee creation of machine gun poorly suited for use with synchronizing gear, although this was not problem as long as IJN would use it only in “free” (turret and fixed but beyond propeller arc) mounts, this seems to be case as they also were working on Scotti, which (at least in original form) was synchronizing-unfriendly, I am far from competent enough for that, but maybe someone after processing data available here: https://patents.google.com/patent/US1925776A/en
would say if Scotti could be reworked to be suitable to synchronous use (i.e. firing from closed bolt) without much tempering?
Some problems with reliability of IJN’s Scotti machine gun lead to question what they were doing with it, as it was mid-1941 and Regia Aeronautica adopted 12,7 mm (12,7x81SR Breda cartridge) of signore Scotti as early as 1933.
Mounting losses forced IJN to found quickly heavy machine gun to bolster defense of their bombers and this time they were lucky enough to get MG131 production technology from III Reich (which mean additional cartridge in form of 13×64 B, but at least have heavy machine gun which works) though they consider it to be only stop-gap solution, but in reality it served to end of conflict.
To end, just cite one line from linked pdf: the sluggish work on the creation of a heavy machine gun for naval aviation lasted three and a half years without any significant progress
The Type 94 flexible could be the 20mm cannon installed in the dorsal position of the Ki-20 bomber. It predated all other flexible 20mm cannon installations in Japanese bombers by several years.
The Breda Mod. 31 was used by the Italian Royal Army on armored vehicles such as command versions of M41 and M42 assault guns. It was also used on the export version of the L3/38 tankette, which however was not bought by the Army. AA versions were also used by the MVSN (“Blackshirts” fascist militia) after they were replaced by 20mm cannons on Navy vessels.
“The Type 94 flexible could be the 20mm cannon installed in the dorsal position of the Ki-20 bomber. It predated all other flexible 20mm cannon installations in Japanese bombers by several years.”
Based on data given in this table it looks to be 1924 SEMAG L, which is mentioned here: http://www.quarryhs.co.uk/apibfamily.jpg
Same cartridge, same weight, Rate-of-Fire bit bigger for Type 94 flexible (380 rpm vs 350 rpm), though this might be just due to difference of measurement in method (actual for Type 94 flexible, no less than for 1924 SEMAG L)
The Germans had the weapon produced under licence in Belgium from late 1943, post war the factory manufacturing them (Mecar SA of Belgium) following the same concept developed the much advanced Blindicide RL-83 (weapon calibre 83mm) which received good sales. With its larger version the RL-100 (100mm) seeing a fair amount of operational use. The Swiss Army under licence produced it as the 8.3cm rocket propelled grenade model 1950, and in two improved versions, Model 58 and Model 58/80, the last still in service. The Wikepedia article has some good photos of all of these. In my personal opinion the Blindicide in both versions was a better weapon that the M20 3.5in Rocket Launcher, but, by that time when I fired the Blindicide RL-83 we were using the Carl Gustav M2, which in its latest version the M4 is truly superb.
Now I noticed that Cold War-era Finnish 55 S 55
https://en.wikipedia.org/wiki/55_S_55
also used 88 mm caliber warhead, taking in account they used Panzerschreck during WWII there might be some connection, though on other hand it surely is not same warhead as it provide 300 mm of penetration of steel. Introduced in 1950s it served for few tens of years, finally being replaced by APILAS (full name 112 RSKES APILAS). Features stadiametric sight, see drawing in Suomi wikpedia query:
https://fi.wikipedia.org/wiki/55_S_55
The 55 S 55 was developed by combining the recoilless gun principle and over-caliber warhead of the Panzerfaust with the reusability of the Panzerschreck. Contrary to the English Wikipedia article, the similar RPG-2 was probably not a major influence. It was not available for study during the development of the 55 S 55, since it had just recently entered service in the Red Army. It is possible and even likely that the HEAT warhead was indeed an improved version of the Panzerschreck’s HEAT rocket, but not a direct copy of it.
Unfortunately details about the development of the 55 S 55 are still quite scarce even in Finnish language sources, since at the time and all the way to the end of the Cold War the Finnish Army was quite secretive and published only basic data about domestically developed weapons.
The 55 S 55 was retired in the early 1990s. Improved HEAT warheads were apparently experimented on in the late 1980s, but in the end the army decided to purchase more M72 LAWs to replace the 55 S 55. Main reason was weight. Two men could carry more LAWs for the same weight as the standard 1+4 shots for the 55 S 55. Preparing a LAW to fire was also faster than reloading the 55 S 55.
Thanks for explanation, looking at penetration there was not boost (M72 LAW penetration also 300 mm) but lesser weight is important advantage.
In addition, the M72A5 LAW (Finnish designation: 66 KES 88) probably has a much more reliable fuze than the 1950s era 55 S 55. Pretty much all HEAT projectile fuzes designed in the 1950s and before had reliability problems with high impact angles and sometimes failed to work.
Having come back to this to see whether there any up dates, I find that I had overlooked the discussion of German weapons to Japan. Japan was supplied by Germany with a huge range of small arms, and aircraft/naval weapons, from pistols via the MG42, rockets of various types, the latest aerial cannons, torpedo/bomb/shell fuses, and all sorts of equipment, including radar, radio and undersea detection electronic equipment. These transported to Japan prior to mid-1942 by surface blockage runners, see :
BARKER Ralph. The Blockade Busters : Cheating Hitler’s Reich of Vital War Supplies. Pen & Sword, Barnsley, 2005 reprint of 1976 original. Hard cover, 224p., photographs, maps, index.
and
BRICE Martin h. Axis Blockade Runners of World War II. Batsford Press, London, 1981. Hard cover, dustjacket, 160p., photographs, drawing, index.
While with the expansion of the war into the Indian Ocean in a major way, a variety of U-Boats were used (they then operating out of Singapore or Java). see :
STEVENS David. U-Boat Far From Home The Epic Voyage of U-862 to Australia and New Zealand. Allen & Unwin, Sydney, 1997. Illustrated card cover, xxi, 282p., photographs, maps, drawings, index.
and
FELTON Mark. Yanagi : The Secret Underwater Trade between Germany & Japan 1942-1945. Pen & Sword, Barnsley, 2005. Hard cover, 209p., photographs, maps, index.
The first just dealing with standard U-Boats, as does the second but also includes all of the ‘Milch Cows” used to take cargo. This included artillery pieces, aircraft, engines for such and vehicles and small warships.
And in the later stages of the war, such a radioactive graphite, information on the German nuclear weapons programme, gas and biological weapons. As well as substantial amounts of exotic metals.
I just wanted to know how much this sold for